
HMS Industrial Networks: Blijf in beweging
Communicatie- en veiligheidsuitdagingen voor fabrikanten van mobiele robots. Mobiele robots zijn overal, van magazijnen tot ziekenhuizen en zelfs op straat. Hun populariteit is makkelijk te begrijpen: ze zijn goedkoper, veiliger, gemakkelijker te vinden en productiever dan echte werknemers.

Ze zijn eenvoudig op te schalen of te combineren met andere machines. Omdat mobiele robots veel real-time data verzamelen, kunnen bedrijven mobiele robots gebruiken om een begin te maken met hun IIoT-activiteiten.
Maar om efficiënt te kunnen werken, hebben mobiele robots veilige en betrouwbare communicatie nodig. Dit artikel schetst de belangrijkste communicatie- en veiligheidsuitdagingen voor fabrikanten van mobiele robots en biedt een eenvoudige manier om deze uitdagingen het hoofd te bieden en mobiele robots in beweging te houden.
Wat zijn mobiele robots?
Laten we voordat we beginnen eerst definiëren wat we bedoelen met mobiele robots.
Mobiele robots transporteren materialen van de ene locatie naar de andere en zijn er in twee soorten, automatisch geleide voertuigen (AGV's) en autonome mobiele robots (AMR's). AGV's gebruiken geleide infrastructuur (draadreflectoren, reflectoren of magneetstrips) om vooraf bepaalde routes te volgen. Als een object het pad van een AGV blokkeert, stopt de AGV en wacht tot het object is verwijderd.
AMR's zijn dynamischer. Ze navigeren via plattegronden en gebruiken data van camera's, ingebouwde sensoren of laserscanners om hun omgeving te detecteren en de meest efficiënte route te kiezen. Als een object de geplande route van een AMR blokkeert, kiest deze een andere route. Aangezien AMR's niet afhankelijk zijn van een geleide infrastructuur, zijn ze sneller te installeren en kunnen ze zich aanpassen aan logistieke veranderingen.
Wat zijn de communicatie- en veiligheidsuitdagingen voor fabrikanten van mobiele robots?
1. Zorgen voor een draadloze verbinding
De eerste uitdaging voor fabrikanten van mobiele robots is het selecteren van de meest geschikte draadloze technologie. Het gebruikelijke advies is om de eisen vast te stellen, de normen te evalueren en de beste combinatie te kiezen. Helaas is dit niet altijd mogelijk voor fabrikanten van mobiele robots, omdat ze vaak de locatie van de machine niet kennen, of de exacte details van de doeltoepassing.
Soms is een Bluetooth verbinding ideaal omdat die een stabiele, niet overbelaste verbinding biedt, terwijl voor andere toepassingen juist een snelle, veilige mobiele dataverbinding nodig is. Wat nuttig is voor fabrikanten van mobiele robots is een netwerktechnologie die eenvoudig kan worden aangepast aan specifieke eisen.
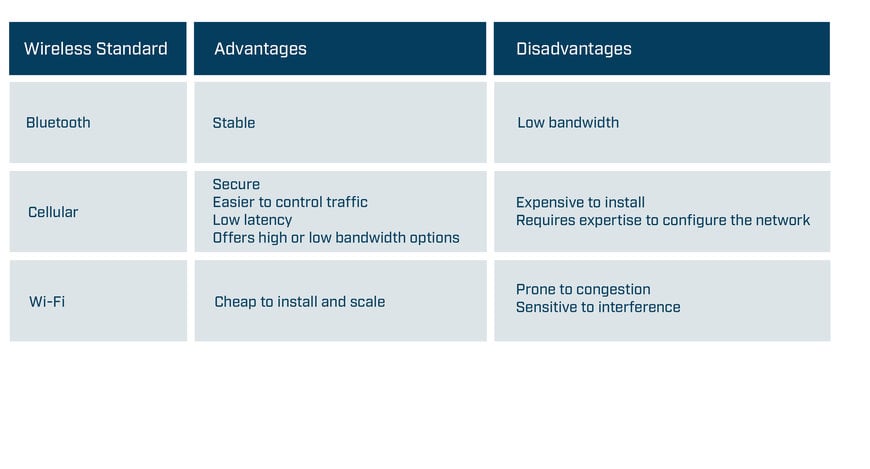
Afbeelding 1. Wireless standaard – voor- en nadelen
De tweede uitdaging is ervoor te zorgen dat de installatie werkt zoals gepland. Alvorens een draadloze oplossing wordt geïnstalleerd, moet eerst een locatieonderzoek uitgevoerd worden op basis van tekeningen, om ervan verzekerd te zijn dat de mobiele robots overal in de locatie voldoende signaaldekking hebben. Aan de hand van deze site survey moeten de optimale locatie voor de Access Points, het juiste antennetype, de optimale antennehoek en de manier om interferentie te onderdrukken, worden vastgesteld. Gebruik na de installatie draadloze sniffer-tools om het ontwerp te controleren en om, indien nodig, AP's of antennes aan te passen.
2. Mobiele robots verbinden met industriële netwerken
Mobiele robots moeten op locatie kunnen communiceren met de daar aanwezige besturingen, ook al gebruiken mobiele robots en besturingen vaak verschillende industriële protocollen. Een AGV kan bijvoorbeeld CANopen gebruiken, terwijl de besturing PROFINET gebruikt. Bovendien willen fabrikanten van mobiele robots soms een zelfde AGV model kunnen gebruiken op meerdere locaties waar de besturing een ander industrieel netwerk, zoals EtherCAT, gebruikt.
Fabrikanten van mobiele robots moeten er ook zeker van zijn dat hun mobiele robots over voldoende capaciteit beschikken om de vereiste hoeveelheid data te verwerken. De vereiste hoeveelheid data hangt af van de grootte en het type installatie. Grote installaties gebruiken vaak meer data, omdat de routing-algoritmen daarvan een groter gebied, meer voertuigen en meer potentiële routes moeten kunnen beslaan. Navigatiesystemen als vision/navigatie, verwerken beelden en vereisen daarom meer rekenkracht dan installaties die gebruik maken van andere navigatiesystemen, zoals reflectoren. Daarom moeten fabrikanten van mobiele robots oplossingen vinden voor de volgende uitdagingen:
1. Zorgen voor een netwerktechnologie die alle belangrijke veldbus en industriële Ethernet netwerken ondersteunt.
2. De netwerktechnologie moet eenvoudig aan te passen zijn, zodat de mobiele robot via hetzelfde industriële netwerk kan communiceren als de besturing, zonder het hardware-ontwerp te hoeven veranderen.
3. Zorgen dat de netwerktechnologie voldoende capaciteit en functionaliteit heeft om de vereiste data te verwerken.
3. Een veilig systeem creëren
Het bouwen van een systeem waarin mobiele robots veilig materialen kunnen vervoeren is een kritieke maar uitdagende taak. Fabrikanten van mobiele robots moeten een systeem ontwikkelen dat rekening houdt met alle mogelijke typen mobiele robots, structuren en mensen in de omgeving. Ze moeten er niet alleen voor zorgen dat de mobiele robots reageren op acties van buitenaf, zoals iemand die een veiligheidsdeur opent of op de knop van een noodstop drukt, maar ook dat de netwerkoplossing verschillende veiligheidsprotocollen en -interfaces kan verwerken. Ook moeten ze er rekening mee houden dat AMR's zich vrij bewegen en daarom het risico van botsingen beheren. De technologie die in sensoren wordt toegepast evolueert voortdurend en fabrikanten van mobiele robots moeten daarom de ontwikkelingen op dat gebied volgen om te kunnen garanderen dat hun producten zo efficiënt mogelijk blijven.
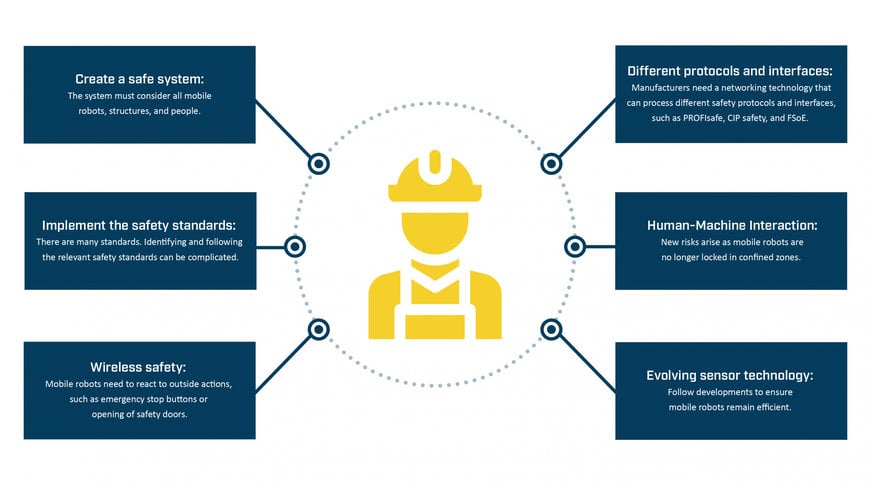
Afbeelding 2. Overzicht van veiligheidsuitdagingen voor fabrikanten van mobiele robots
Veiligheidsnormen
De veiligheidsnormen bieden richtlijnen voor het implementeren van veiligheid-gerelateerde componenten, het voorbereiden van de omgeving en het onderhouden van machines of apparatuur.
Terwijl naleving van de verschillende veiligheidsnormen (ISO, DIN, IEC, ANSI, enz.) doorgaans vrijwillig is, zijn machinebouwers in de Europese Unie wettelijk verplicht de veiligheidsnormen in de machinerichtlijnen te volgen. De Machinerichtlijn 2006/42/EG is altijd geldend voor fabrikanten van mobiele robots, en in sommige toepassingen kan ook richtlijn 2014/30/EU relevant zijn, aangezien deze de elektromagnetische compatibiliteit van installaties regelt. De Machinerichtlijn 2006/42/EG beschrijft de eisen voor het ontwerp en de bouw van veilige machines die op de Europese markt worden gebracht. Fabrikanten mogen alleen een CE-markering aanbrengen en de machine aan hun klanten leveren als zij in de conformiteitsverklaring kunnen aantonen dat zij aan de eisen van de richtlijn hebben voldaan.
Hoewel de andere veiligheidsnormen niet verplicht zijn, doen fabrikanten er goed aan ze toch te volgen, omdat ze helpen te voldoen aan de eisen van de Machinerichtlijn 2006/42/EG. Fabrikanten kunnen bijvoorbeeld de adviezen in ISO 12100 volgen om vastgestelde risico's te beperken tot een aanvaardbaar restrisico. Ze kunnen aan de hand van ISO 13849 of IEC 62061 voor elk risico het vereiste veiligheidsniveau vinden en er vervolgens voor zorgen dat de bijbehorende veiligheid-gerelateerde functie aan de gedefinieerde eisen voldoet. Fabrikanten van mobiele robots bepalen zelf hoe zij een bepaald veiligheidsniveau realiseren, bijvoorbeeld door de snelheid van de mobiele robot te verlagen om het risico op botsingen en de ernst van verwondingen tot een aanvaardbaar niveau te beperken. Of ze kunnen ervoor zorgen dat mobiele robots alleen werken in afgescheiden zones waar menselijke toegang verboden is (gedefinieerd als zones met beperkte toegang in ISO 3691-4).
Het vaststellen van de juiste normen en het implementeren van de eisen is de beste manier waarop fabrikanten van mobiele systemen een veilig systeem kunnen creëren. Maar zoals deze samenvatting suggereert, is het een ingewikkeld en tijdrovend proces.
4. Zorgen voor betrouwbare CAN communicatie
Als betrouwbare en eenvoudig te implementeren standaard sinds de jaren tachtig, groeit de CAN-gebaseerde communicatie nog steeds in populariteit, vooral door het gebruik ervan in uiteenlopende booming industrieën, zoals e-mobiliteit en batterij-energieopslagsystemen (BESS). CAN is eenvoudig, energie- en kostenefficiënt. Alle apparaten in het netwerk hebben toegang tot alle informatie. Bovendien is het is een open standaard, wat betekent dat gebruikers berichten naar wens kunnen aanpassen en uitbreiden.
Voor fabrikanten van mobiele robots wordt de CAN verbinding alleen maar belangrijker, omdat ze daarmee de lithium-ion batterijen, die steeds vaker worden toegepast in de aandrijfsystemen voor mobiele robots, hetzij in retrofit systemen, hetzij in nieuwe installaties, kunnen monitoren. Fabrikanten van mobiele robots wordt aangeraden om in dit kader de volgende acties te ondernemen:
1. Zorgen voor een betrouwbare verbinding met de CAN- of CANopen-communicatie standaards, zodat ze hun apparaten kunnen controleren, zoals de status en prestaties van de batterij.
2. De systemen beschermen tegen elektromagnetische interferentie (EMI), aangezien dit de elektronica van een systeem kan beschadigen. Het risico van EMI is groter bij retrofits, omdat de toevoeging van nieuwe componenten, zoals batterijen in de buurt van de communicatiekabel, hoogfrequente elektromagnetische storingen kan veroorzaken.
5. Toegang tot mobiele robots op afstand
De mogelijkheid om op afstand toegang te krijgen tot het besturingssysteem van een machine stelt verkopers en technici van mobiele robots in staat te troubleshooten en de meeste problemen op te lossen zonder de locatie te hoeven bezoeken.
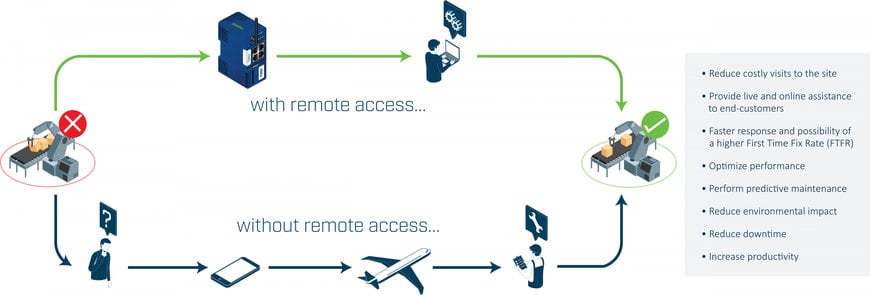
Afbeelding 3. Voordelen van remote access
De uitdaging is om een remote access oplossing te creëren die een goede balans biedt tussen de behoeften van de IT-afdeling en de behoeften van de technicus of leverancier.
De IT-afdeling wil kunnen garanderen dat het netwerk veilig en betrouwbaar blijft en zijn integriteit behoudt. Daarom moet de remote access oplossing de volgende veiligheidsmaatregelen omvatten:
- Gebruik bij voorkeur uitgaande in plaats van inkomende verbindingen om de impact op de firewall tot een minimum te beperken.
- Scheid het relevante verkeer van de rest van het netwerk.
- Versleutel en bescherm al het verkeer om de vertrouwelijkheid en integriteit ervan te waarborgen.
- Zorg ervoor dat leveranciers werken conform de relevante beveiligingsnormen, zoals ISO 27001, of hier gecertificeerd voor zijn.
- Zorg ervoor dat leveranciers regelmatig beveiligingsaudits uitvoeren.
De technicus of leverancier wil een gebruiksvriendelijk en betrouwbaar systeem. Gebruikers moeten makkelijk verbinding kunnen maken met de mobiele robots en toegang hebben tot de vereiste informatie. Als de installatie wordt veranderd, moet het aantal robots makkelijk kunnen worden aangepast. Als de mobiele robots zich in een ander land bevinden dan de leveranciers of technici, moet de netwerkinfrastructuur voldoende dekking en redundantie hebben om globale beschikbaarheid te garanderen.
Conclusie
Zoals we hebben gezien, moeten fabrikanten van mobiele robots veel communicatie- en veiligheidsuitdagingen oplossen. Ze moeten een draadloze verbinding tot stand brengen, data over verschillende netwerken versturen, veiligheid waarborgen, verbinding maken met CAN-systemen en de robots op een veilige manier op afstand kunnen bedienen. En om het nog complexer te maken, moet elke installatie steeds opnieuw worden beoordeeld en aangepast aan de lokale vereisten.
Beste aanpak voor het implementeren van mobiele robotcommunicatie
Fabrikanten van mobiele robots zijn zelden communicatie- of veiligheidsexperts. Daarom kan het voor hen tijdrovend en duur zijn om te proberen de vereiste communicatietechnologie zelf te ontwikkelen. Een beroep doen op communicatieoplossingen van derden lost niet alleen de communicatie-uitdagingen op, maar biedt ook andere voordelen.
Moderne communicatieoplossingen hebben een modulair ontwerp. Dit stelt fabrikanten van mobiele robots in de gelegenheid om een netwerkproduct dat is ontworpen voor één standaard of protocol, te verwijderen en te vervangen door een product dat is ontworpen voor een andere standaard of een ander protocol, zonder dat dit gevolgen heeft voor andere delen van de machine. Zo kan Bluetooth in de ene installatie de meest geschikte draadloze standaard zijn, terwijl wifi in een andere installatie juist een betere dekking biedt. Evenzo kan de ene locatie de protocollen PROFINET en PROFIsafe gebruiken, terwijl een andere locatie weer andere industriële en veiligheidsprotocollen gebruikt. In beide scenario's kunnen fabrikanten van mobiele robots gebruik maken van communicatieproducten waarmee de netwerktechnologie kan worden aangepast aan de lokale vereisten, zonder het hardware ontwerp te hoeven veranderen.
Auteurs:
Mark Crossley, Daniel Heinzler, Fredrik Brynolf, Thomas Carlsson
HMS Networks
HMS Networks is een in Zweden gevestigde industriële communicatie-expert, die uiteenlopende oplossingen biedt voor AGV communicatie. Lees meer op www.hms-networks.com/agv
