
www.technologieenindustrie.com
19
'23
Written on Modified on
Faulhaber: Autonome transportsystemen worden complexer
Door de ontwikkelingen van Industrie 4.0 en Intralogistiek 4.0 verandert de productieomgeving, en daarmee ook de impact van automatisch geleide voertuigen (AGV's) en autonome mobiele robots (AMR's).
Om ervoor te zorgen dat de industrie de trends bij kan houden met snelle en kosteneffectieve ontwikkeling, hebben Markus Fenn en Prof. Dr. Stefan May het platform Eduard ontwikkeld voor onderwijs en prototypering. Eduard is ideaal om de huidige trends in kaart te brengen.
BS: Hoe is uw robotplatform ontstaan?
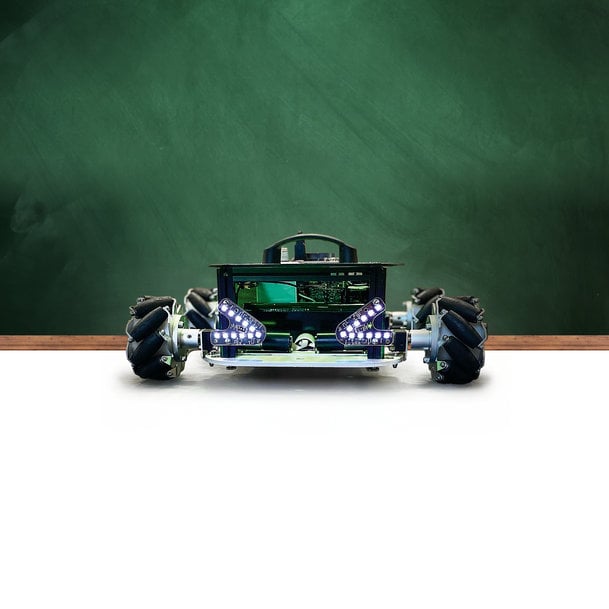
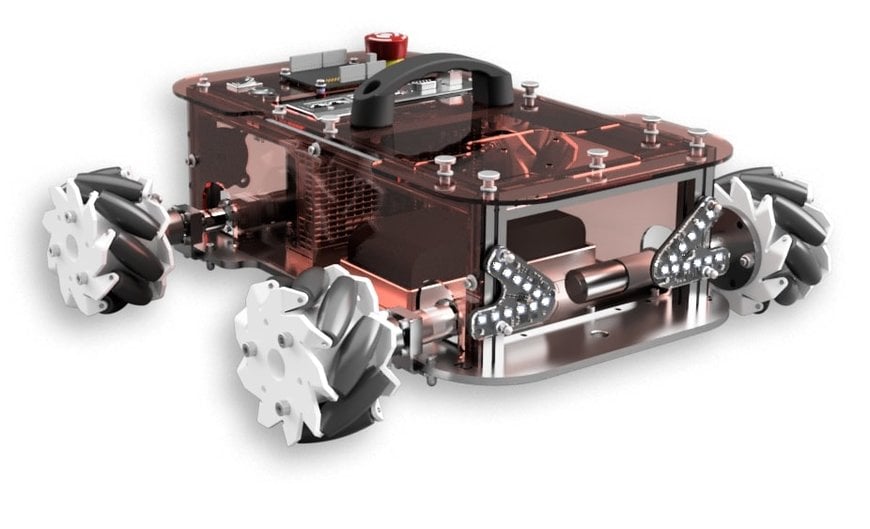
Markus Fenn: De robot zelf heet Eduard. Hij is ongeveer 40 x 40 x 15 cm groot en weegt bijna 8 kg. Hij is gemaakt nadat een bedrijf een aanvraag had gedaan bij Stefan May. Het bedrijf was op zoek naar een platform om hun medewerkers onderwijs en trainingen voor mobiele robotica te kunnen geven. Daarom biedt EduArt Robotik GmbH niet alleen het robotplatform zelf, maar ook verschillende opties voor onderwijs en diensten voor tests en optimalisatie.
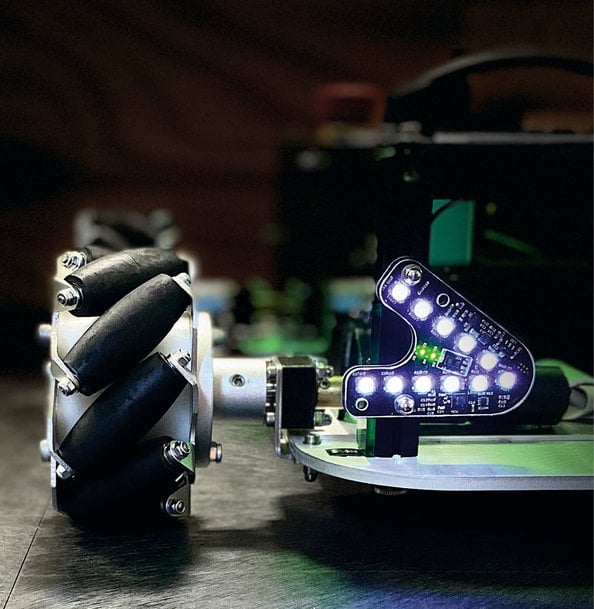
Het platform werkt met eenvoudige rubberen banden of mecanum-wielen. Hiermee kan de robot op zijn plaats roteren en opzij of diagonaal rijden. Zo is nauwkeurige positionering mogelijk en kan hij navigeren in hele krappe ruimtes. De rubberen banden worden vooral gebruikt voor tests in de open lucht of in reddingsrobots, maar alleen in simulaties. Voor beide toepassingen is het gebruik van de hoogwaardige motoren van FAULHABER ideaal.
BS: Wat maakt uw robotplatform uniek?
Markus Fenn: Het platform heeft open interfaces, een geïntegreerd sensorconcept met ingebouwde apparatuur voor afstands- en traagheidsmeting, en een ingebouwd batterijmanagementsysteem (BMS). Deze basisuitrusting kan op aanvraag worden uitgebreid, door ons of door de klant zelf. Zo kan de klant bijvoorbeeld de overbrengingsverhouding van de aandrijving selecteren – 72:1 of 89:1 – afhankelijk van de vereiste snelheid of het benodigde koppel. Zo kunnen klanten hun nieuwe concepten kosteneffectief testen. Maar we ondersteunen ook de implementatie van toepassingsoplossingen.
BS: Hoe relevant is Eduard voor de industrie?
Markus Fenn: AGV's en AMR's worden steeds belangrijker voor de automatisering, maar in veel bedrijven is men hier niet van op de hoogte. Met het robotplatform is het bijvoorbeeld mogelijk om snel en eenvoudig een nieuw sensorsysteem te testen. En omdat het platform naar behoefte kan worden uitgebreid, kan hiermee de relevante kennis in de productie vloeien.

BS: AGV's en AMR's worden steeds autonomer. Ze worden een productiecomponent en ze werken met productiemodules in plaats van transportbanden. Dus AVG's en AMR's moeten samenwerken. Kunnen ze met elkaar communiceren?
Markus Fenn: AGV's en AMR's werken met de standaard interface VDA5050 en kunnen dus ook met het besturingscentrum communiceren. Met een platform als Eduard kunnen klanten eenvoudig nieuwe software testen, en de resultaten kunnen dan 1:1 worden overgenomen voor grote AGV's en AMR's. Zo kunnen ze dus toepassingen evalueren zonder veel simulatie, omdat de software voor Eduard of een groter systeem in principe hetzelfde blijft. Een Digital Twin ondersteunt de planning en uitbreiding en is op aanvraag ook verkrijgbaar bij het platform.
BS: De aandrijfsystemen van Eduard moeten ook voldoen aan de toekomstige vereisten voor AGV- en AMR-concepten. Welke aandrijfsystemen gebruiken jullie voor het platform, en waarom?
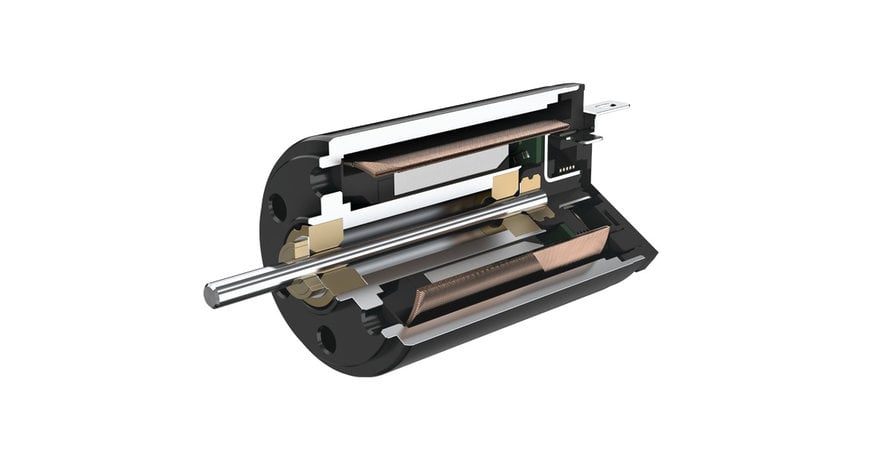
Markus Fenn: Voor ons trainings- en Proof-of-Concept-platform hebben we gekozen voor DC-micromotoren met edelmetaalcommutatie van FAULHABER. Ondanks hun kleine formaat kunnen ze een groot koppel genereren en zijn ze bijzonder energie-efficiënt. Bovendien zijn ze makkelijk te besturen en geschikt voor extreem nauwkeurige regellussen.
Voor grotere platformen gebruiken we grotere DC-motoren van dezelfde leverancier, bijvoorbeeld eenvoudige bestuurbaarheid met eigen elektronica. Indien nodig kunnen we voor specifieke toepassingen ook borstelloze DC-motoren inbouwen, omdat die onderhoudsvrij en stevig zijn.

BS: De trend binnen de productie gaat al langer naar kleinere oplages en meer varianten. Wat voor effect heeft dit op de logistiek en op de functionaliteit van AGV's en AMR's?
Markus Fenn: Je hebt robots nodig voor kleinere ladingen, dus kleinere robots met kleinere maar krachtigere aandrijvingen, zoals de sterke aandrijvingen van FAULHABER. Deze autonome industriële voertuigen hebben minder elektronica en kleinere batterijen, dus ze wegen minder en verbruiken minder energie. Als de belasting weer hoger wordt, is het makkelijk om op te schalen en als een eenheid te werken, omdat de robots door hun nauwkeurige aandrijvingen kunnen samenwerken zonder dat ze hierbij botsen.
BS: Meer functionaliteit verhoogt ook de complexiteit van AGV's en AMR's. Wat is haalbaar, en wat is zinnig?
Markus Fenn: Bij AGV's en AMR's is eigenlijk alleen de software complex. Wat belangrijk is, is de planning om ervoor te zorgen dat AGV's soepel kunnen samenwerken. Een AGV moet zo intelligent mogelijk zijn en niet alleen een pallet herkennen, maar ook zien of die leeg of vol is, of misschien gekanteld is. Hier is een rol weggelegd voor AI, kunstmatige intelligentie. AI verhoogt de complexiteit, en onze kleine robot is bij uitstek geschikt om dit te testen.
BS: Nog een trend is de opkomst van grotere geautomatiseerde vloten. Hiervoor is vlootbeheer nodig.
Markus Fenn: In vloten moeten robots met elkaar communiceren, ze moeten zelf 'denken', informatie uitwisselen via standaard interfaces en indien nodig samenwerken. In grote en kleine AGV's en AMR's is de software in principe hetzelfde, het verschil is maar een paar regels code. De software heeft maar weinig informatie over de AMR nodig. Het programma moet bijvoorbeeld berekenen waar de robot zich bevindt in de fabriekshal. De navigatie is een van de weinige componenten die de afmetingen van de robot kent, en die zoekt het passende pad. Testen is echter altijd belangrijk, want mobiele robotica staat nog in de kinderschoenen. Daarom zijn er nog niet veel standaarden.
De controller van de motor berekent hoeveel wielomwentelingen er nodig zijn om de vereiste snelheid te bereiken. Er zijn maar drie regels code nodig om dit aan te passen, of een configuratiebestand. FAULHABER levert motoren met bijzonder nauwkeurige tandwielkasten en encoder voor precieze positionering, en samen bieden ze optimale performance en veiligheid.
BS: Voor Intralogistiek 4.0 en Industrie 4.0 moeten AGV's en AMR's aangesloten zijn op een netwerk. Hoe zit het met werken via de cloud, of nog beter, via de edge? En kunt u iets zeggen over de beveiliging en de risico's door hackers?
Markus Fenn: Afhankelijk van de fabrikant kunnen de systemen tot op zekere hoogte 'onhackbaar' gemaakt worden door de hardware los te koppelen van het internet. Robots hebben veiligheidsscanners met afstandssensoren, zodat ze niet tegen een muur aanrijden. Dat betekent dat een robot geen gevaarlijke bewegingen kan uitvoeren, zelfs niet als hij wordt gehackt. En de procesgegevens zijn net zo veilig in het netwerk als het bedrijfsnetwerk zelf.
BS: Het doel voor Industrie 4.0 is om multimodale, heterogene systemen op te zetten die zichzelf organiseren. Dat vereist een gegevensuitwisseling tussen AGV's en AMR's. En ook de AI heeft data nodig. Wat zijn de vereisten voor de componenten van FAULHABER, aangezien ook die gegevens moeten verzamelen en doorsturen?
Markus Fenn: Hiervoor gebruiken de systemen 5G of het interne draadloze netwerk van een bedrijf. De systemen hebben de data niet in real-time nodig, omdat er gegevens beschikbaar zijn uit de planningsfase. De routes en snelheden zijn bijvoorbeeld beschikbaar in de routeplanning van het systeem, en die wijzigen niet constant. Als een robot van punt A naar punt B gaat, is er alleen om de paar seconden een levensteken nodig. Dat vermindert de hoeveelheid traffic en voorkomt dat het netwerk overbelast raakt. De gegevens worden op de AMR samengevoegd en daar geëvalueerd. Encoders registreren wat er gebeurt en zorgen met de controllers voor een veilige besturing.
BS: Hoe veilig zijn AGV's en AMR's?
Markus Fenn: Heel veilig. Als een van de vier motoren uitvalt, herkent de controller dit en stopt die vervolgens de aandrijving. De laser detecteert het als er een persoon aanwezig is, en vervolgens remt het systeem. Deze twee veiligheidsmechanismen zijn voldoende.
BS: Op welke punten is er nog onderzoek nodig voor de ontwikkeling van toekomstige AGV's en AMR's? En hoe zal uw testplatform veranderen op basis van deze vereisten? Tegelijkertijd worden er ook hogere eisen gesteld aan de aandrijvingen. Hoe zit het met de aandrijvingen van de toekomst?
Markus Fenn: Robots moeten onderling beter in een netwerk functioneren. Dan werken bijvoorbeeld vier robots samen aan een transporttaak, met als uitgangspunt: veel kleinere robots, in plaats van één grotere. Hiervoor zijn meer kleinere motoren nodig die met extreme precisie moeten werken, anders zal de zwerm haperen of niet meer synchroon werken. Om de betrouwbaarheid te verbeteren moet encoders absoluut immuun zijn voor storingen, zodat externe factoren geen ongewenste invloed hebben op de robots. Daarom gebruikt FAULHABER soms twee encoders op iedere motor.
Als je de verschillende uitvoeringen van tandwielkasten van FAULHABER neemt, met de verschillende lengtes en diameters, samen met de motoren, encoders, controllers enzovoorts, dan kan je theoretisch gezien 25 miljoen verschillende combinaties maken. En FAULHABER heeft een aanzienlijk aantal daarvan al geïmplementeerd. Dat betekent dat ieder bedrijf de optimale aandrijvingen kan vinden, ook voor de toepassingen van de toekomst.
