
www.technologieenindustrie.com
26
'21
Written on Modified on
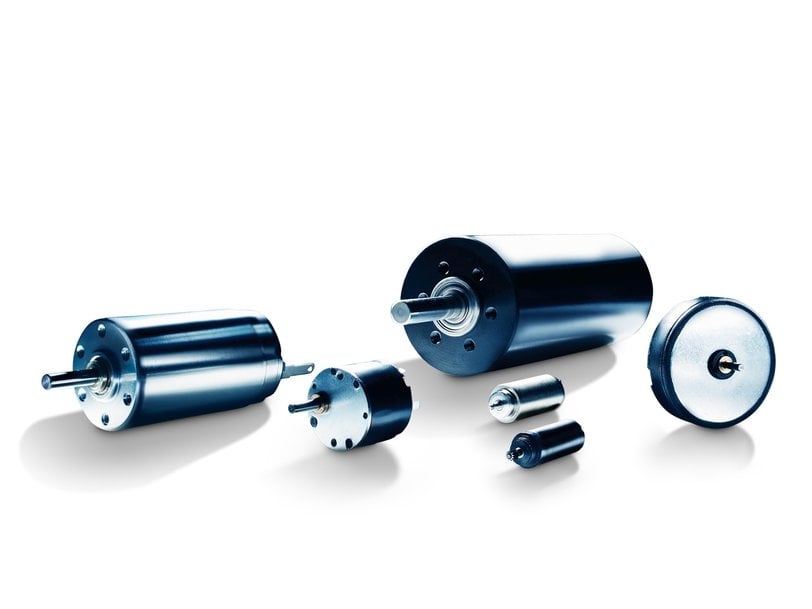
DC-microaandrijvingen en bijpassende Motion Controllers
Coole partners voor kleine heethoofden. Voor de ontwikkeling van steeds verder geïntegreerde systemen zijn kleine, krachtige DC-motoren essentieel. Dit soort motoren drijven technologie aan in uiteenlopende sectoren, van medische en laboratoriumtechnologie tot aan toepassingen in de ruimtevaart, robotica, optica en fotonica. .
Bij de keuze van een geschikte motion controller voor een aandrijfsysteem is het belangrijk om eerst een paar vragen te beantwoorden. De ontwerper moet bijvoorbeeld bepalen welke bewegingen de motor uit moet voeren, en vervolgens nagaan wat voor eisen dat stelt aan de controller die de motor aanstuurt. Werkt de aandrijving continu of in een start-stoppatroon? Vraagt de toepassing om nauwkeurige positionering? Wat voor soort last moet de aandrijving in beweging brengen? Wat zijn de belastingscycli? Is er een tandwielkast vereist? Welke motor is de beste keus voor de toepassing? Op basis van de antwoorden kan dan de motion controller worden geselecteerd. Dat luistert nauw, want niet iedere controller is geschikt voor iedere motor. Vooral DC-micromotoren hebben vanwege hun ontwerp specifieke vereisten.
Risico op oververhitting
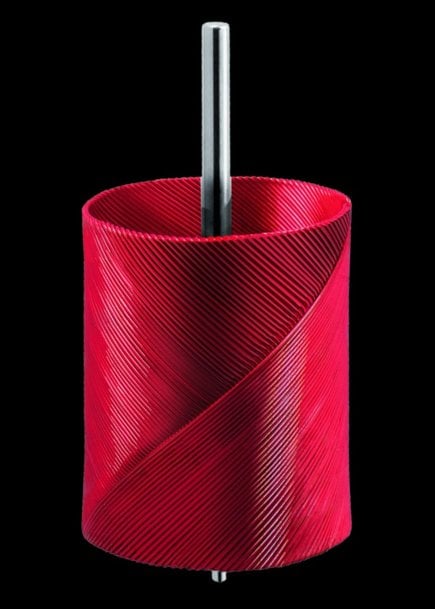
Het hart van de DC-minimotoren en -micromotoren van FAULHABER wordt gevormd door de gepatenteerde, zelfdragende, kernloze spoel met een schuin gewikkeld ontwerp en borstelcommutatie, die draait om een vaste magneet. Dit soort motor heet ook wel een klokankermotor, een verwijzing naar het typerende uiterlijk. Het design heeft niet alleen veel praktische voordelen, maar het heeft ook een uitwerking op de selectie van de motion controller.
Door de symmetrische luchtopening treedt geen restkoppel op, zodat nauwkeurige positionering en uitstekende toerentalregeling mogelijk worden. De verhouding tussen belasting en toerental, stroom en koppel en spanning en toerental is lineair. Vrijwel de gehele motordiameter is bovendien beschikbaar voor de wikkeling, waardoor de motoren in vergelijking met conventionele ontwerpen meer kracht en koppel leveren voor hun formaat. De lage traagheid van de rotor garandeert ook een bijzonder lage elektrische tijdconstante. Dat maakt een bedrijf met hoge dynamiek en zware overbelasting mogelijk. Een drievoudig continu koppel in de overbelastingsmodus is niet ongebruikelijk en eenvoudig haalbaar voor servotoepassingen. Er is echter één voorwaarde: de temperatuur van de rotorspoel moet worden bewaakt. Motoren met een diameter van slechts 22 mm of zelfs nog minder, hebben echter geen ingebouwde temperatuursensor. Hiervoor is simpelweg geen ruimte. Als er dus een willekeurige controller wordt aangesloten op een microaandrijving, kan de spoel volledig doorbranden voordat er warmte naar buiten treedt en wordt opgemerkt.
Dit soort problemen kan worden voorkomen met motion controllers van FAULHABER, die specifiek zijn ontworpen voor de vereisten van mini- en microaandrijvingen en onder realistische bedrijfsomstandigheden zijn getest. Deze controllers schatten de temperatuur van de wikkeling van het gekoppelde motortype in op basis van modellen, die uiteenlopen in complexiteit. Dit stelt de ontwerper in staat om het volledige dynamisch bereik van de motor te benutten, bijvoorbeeld voor snelle positioneringstaken. Ook wordt de stroom gereduceerd, voordat de spoel oververhit raakt. De benodigde parameters worden gebruiksvriendelijk overgedragen naar de controller van de aandrijving, dankzij het dialoogvenster voor de motorselectie in de FAULHABER Motion Manager.

Voor finetuning kan extra informatie over de thermische integratie in de toepassing worden toegevoegd aan de modellen die zijn opgeslagen in de controllers. Hoe goed wordt de motor gekoeld? Moet het vermogen worden beperkt door hoge omgevingstemperaturen? Werkt de configuratie met een tandwielkast en een encoder? Met dit soort extra gegevens kan het maximale motorvermogen bijvoorbeeld ook worden gebruikt met een aandrijving die cyclisch werkt in een klimaatkast. De controller van de motor volgt dan de parameters voor de omgevingstemperatuur uit de besturing van de klimaatkast en past deze toe in de opgeslagen modellen. Ditzelfde principe geldt ook als de belastingscycli bekend zijn. Op deze manier kan vaak een kleinere motor worden ingezet, wat zeker in mobiele toepassingen een voordeel is.
Door de lage elektrische tijdconstante, die goed is voor dynamische processen, kunnen extra verliezen optreden door de Pulse Width Modulation (PMW) die vaak wordt toegepast in controllers voor aandrijvingen. De typische elektrische tijdconstante van kernloze motoren van FAULHABER is ongeveer 10 µs. Voor PMW-frequenties onder de 50 kHz is het continukoppel uit het gegevensblad in veel gevallen niet meer haalbaar, of de motor kan oververhitten. Daarom is het belangrijk om bij de selectie van een controller te letten op een afdoende hoge PWM-frequentie. Voor motion controllers van FAULHABER ligt deze tussen de 78 en 100 kHz, afhankelijk van het type. Door het type modulatie werkt er tot 200 kHz op de motor, wat goed aansluit op de vereisten van deze kleine motoren.
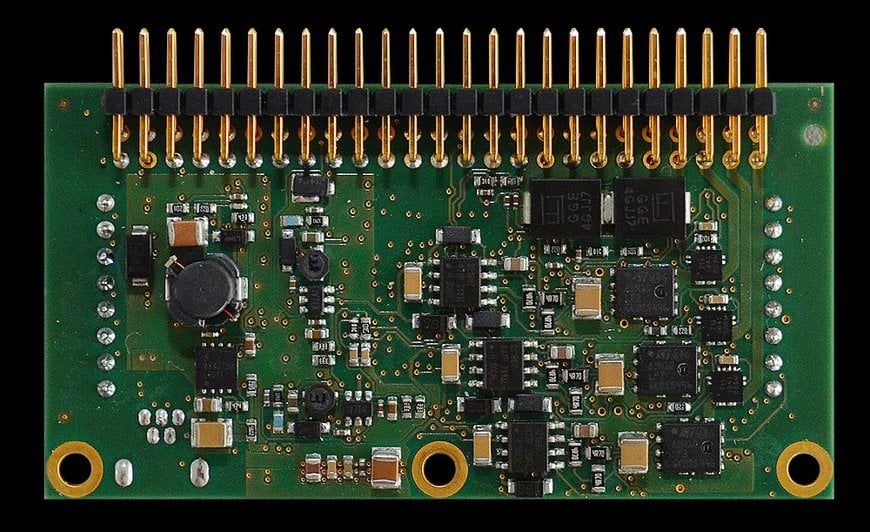
Krachtig en extreem compact
De motion controllers uit de MC V3.0-serie hebben zich al jaren bewezen, maar ze zijn slechts beperkt bruikbaar voor de micromotoren van FAULHABER, vanwege hun formaat en de resolutie van de ingebouwde meting van de motorstroom. Daarom is de nieuwe MC 3001 B/P een uitkomst: het is de de eerste motion controller die perfect geschikt is voor kleinere servomotoren, zowel qua formaat als qua resolutie van de stroommeting. Met een maximale voedingsspanning van 30 V bereikt de controller van 16 x 27 x 2,6 mm (B x L x H) een continustroom van 1 A en een piekstroom van 5 A. Bij lagere voedingsspanningen, zoals in 12 V-systemen, is een continustroom tot 2 A ook makkelijk haalbaar. Tegelijkertijd doen deze controllers in functionaliteit niet onder voor de grotere modellen. De I/O-mogelijkheden en de encoderinterface zijn hetzelfde als in de rest van de productfamilie. Communicatie is mogelijk via USB, RS232, en CANopen. Via een klantspecifieke board (moederbord) kan ook een compacte EtherCAT-interface worden geleverd.

De controllers zijn verkrijgbaar in twee varianten. Het model met platte board-to-board-connectors (MC 3001 B) is ideaal als er verschillende controllers voor aandrijvingen worden gecombineerd op één drager. De uitvoering MC 3001 P heeft een driezijdige stekkerconnector van 2,54 mm. Deze versie integreert eenvoudig in uw eigen configuratie, bijvoorbeeld voor meerassige toepassingen in de laboratoriumautomatisering. U kunt nu dus ook bij de allerkleinste DC-aandrijvingen van FAULHABER eindelijk gebruik maken van krachtige motion controllers die perfect aansluiten op de motor, zowel qua formaat als qua functie.
