
www.technologieenindustrie.com
29
'14
Written on Modified on
‘CAN FD’ daagt veldbussen en industrieel Ethernet uit in speciaalmachines
CAN FD biedt de mogelijkheid om bestaande CAN systemen en CAN kennis te gebruiken, zelfs als de eisen wat betreft het aantal knooppunten, overdrachtssnelheden en cyclustijden hoog zijn. Thomas Waggershauser van HMS legt uit hoe.
Mogelijke toepassingen voor CAN FD
De groeiende vraag naar meer knooppunten, grotere overdrachtssnelheden en kortere cyclustijden, leidt tot knelpunten die door de beperkingen van het klassieke CAN (8 bytes data en een datasnelheid van 1 Mbit/s) niet kunnen worden opgelost: de datasnelheid die afhangt van de uitbreiding van het netwerk en de korte datalengte voor service en analoge data, spelen hierbij een speciale rol.
In het dagelijks gebruik worden deze beperkingen vaak omzeild met compromissen: het opdelen van het systeem in verschillende netwerksegmenten voor meerdere toepassingen - of zelfs in parallelle netwerken - betekent dat de bestaande technologie continu wordt uitgehold, hetgeen vaak heeft geleid tot oplossingen die complex en duur zijn wat betreft configuratie, installatie en onderhoud. In principe is een overstap naar high performance industriële Ethernet technologieën mogelijk. De groeiende en vaak noodzakelijke investeringen en de aanpassing van datastructuren en manier van denken wat betreft de configuratie, met name bij tijdgestuurde systemen, vormen echter vaak een flinke uitdaging bij uitgebreide netwerken. Bovendien is een omslag in ontwikkeltools, inbedrijfstelling en service noodzakelijk, die veel gebruikers vaak doet afzien van een volledige conversie.
Tegelijkertijd bestaat de behoefte om bestaande knowhow op een nuttige manier te gebruiken. Hier kan CAN FD een rol bij spelen: CAN FD (CAN met flexibele datasnelheid) is een uitgebreide versie van het bekende ‘klassieke’ CAN dat Bosch in 2012 introduceerde, waarmee de bruikbare datasnelheid en datalengte aanzienlijk kunnen worden vergroot. Daarbij zijn reeds beproefde en geteste CAN concepten gehandhaafd gebleven: arbitrage op basis van message ID's, event-driven verzending van berichten en bevestiging van ontvangen boodschappen door middel van het acknowledgement bit.
Verbeterde datasnelheid
Message acknowledgement door ontvangers, zoals dat wordt gebruikt in het klassieke CAN, biedt een breed scala van voordelen, doordat het succes van de verzending wordt bevestigd binnen het verzonden bericht - mogelijke transmissiefouten worden snel gedetecteerd en de data kan zeer snel opnieuw worden verzonden. Arbitrage van de berichten gebaseerd de CAN identifier biedt ook voordelen voor besturingstoepassingen doordat botsingen tijdens de datatransmissie worden vermeden en door de korte latency tijden voor berichten met hoge prioriteit, zelfs bij hoge busbelasting. Het nadeel van de gebruikte methoden is dat, om fouten te voorkomen, op het tijdstip van samplen alle knooppunten hetzelfde busniveau moeten hebben. Derhalve moet een bit interval voldoende signaalpropagatietijd beschikbaar stellen tussen de twee het verst uit elkaar liggende knooppunten in een netwerk, inclusief hun busactivatie. Het bit interval en dus ook de datasnelheid zijn dus direct afhankelijk van de uitbreiding van het netwerk; bij een uitbreiding van 40 m is een snelheid tot 1 Mbit/s mogelijk, maar bij een uitbreiding van 250 m daalt deze tot 250 kbit/s.
Om de datasnelheid verder te verhogen zonder de bestaande communicatietechnologie aan te moeten passen, werkt CAN FD met twee verschillende bit rates. De arbitrage rate voor de stuurcommando’s (inclusief arbitrage, einddetectie berichttype en bevestiging) is afhankelijk van de propagatiesnelheid en daarmee van de netwerkuitbreiding. Daarentegen wordt optioneel een tweede data bit rate gebruikt, namelijk voor de datacontent en databeveiliging. Op dat tijdstip wordt de bus alleen bezet door de message transmitter, waardoor directe feedback binnen de bit tijd overbodig is. De maximaal bereikbare datasnelheid is dus alleen afhankelijk van de transmissiekarakteristiek van het transmissiemedium, en niet van de signaalpropagatie. CAN FD netwerken werken momenteel met 8 Mbit/s, terwijl de CAN FD standaard tot 15 Mbit/s toestaat. Deze bit rate is ook met succes toegepast in verschillende testsystemen.
De twee datasnelheden worden onafhankelijk van elkaar in de CAN FD controller ingesteld met behulp van twee bit timing registers. Schakelen tussen de twee datasnelheden wordt gedaan met behulp van twee control bits in het protocol. De eerste bit wordt gebruikt als ‘Extended Data Length’ (EDL) bit en definieert een CAN FD message op basis van zijn recessief niveau. De actuele bitsnelheid omschakeling wordt uitgevoerd door een nieuwe toegevoegde bit, de ‘Bit Rate Switch’ (BRS) bit, waarin naar de hogere bitsnelheid wordt overgeschakeld op het sampling tijdstip. Teruggeschakeld wordt op het moment dat de CRC restriction bit wordt gesampled.
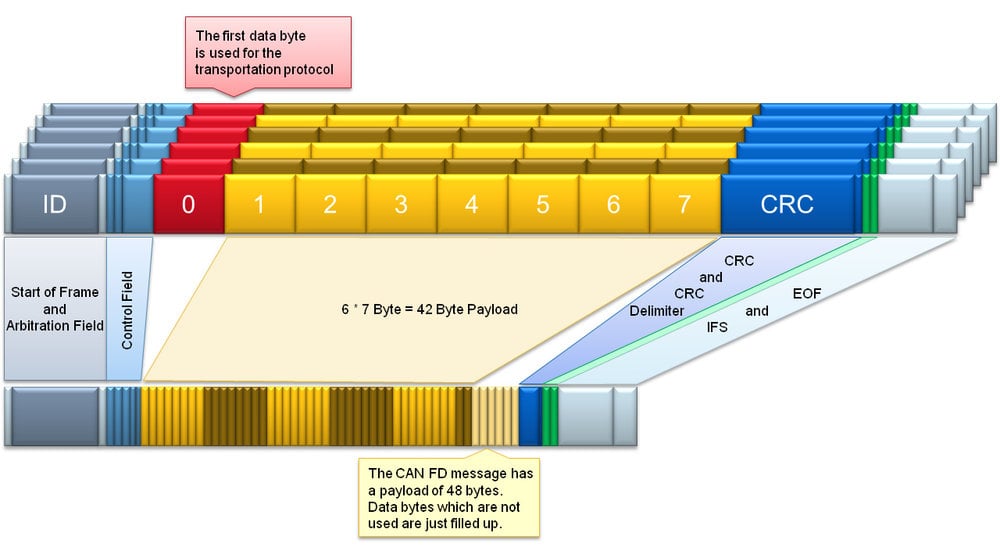
Afbeelding 1: Voordelen van CAN FD - 1.
In dit voorbeeld worden configuratiedata van in totaal 42 bytes doorgegeven. Om dit via het klassieke CAN te kunnen doen, moet een transportprotocol worden geïmplementeerd om de totale hoeveelheid data in 8-bytes berichten te kunnen verzenden. Het voorbeeld is gebaseerd op een model transportprotocol dat alleen gebruik maakt van de eerste databyte voor het controleren van de datastroom. Dit betekent dat nog maximaal 7 bytes beschikbaar zijn voor elk CAN bericht. Afhankelijk van het toegepaste transportprotocol, kunnen extra velden nodig zijn voor controle. Hieronder, ter vergelijking, een CAN FD bericht met 48 bytes aan user data, dat de vereiste 6 klassieke CAN berichten kan vervangen. Omdat de data in het CAN FD bericht erboven ook worden verzonden met een hogere bitsnelheid, heeft dit CAN FD bericht aanzienlijk minder bustijd nodig dan de klassieke CAN berichten. Daarnaast maakt het gebruik van een enkel CAN FD bericht het beheer van de datastroom hier aanzienlijk eenvoudiger.
Uitgebreide user data
De besturingsdata worden nog steeds verzonden met de bekende lagere bitsnelheden, waardoor de uiteindelijk te bereiken bitsnelheden niet worden gehaald. Door het vergroten van het user data gebied tot 64 bytes, kunnen meer data worden verzonden in een snelle transfermode, waardoor de datasnelheid effectief wordt vergroot. Het klassieke CAN biedt slechts 8 databytes, hetgeen niet langer voldoende is voor veel data-applicaties, zoals het verzenden van zeer nauwkeurige analoge waarden of het regelen van een meerassige robot met zijn uiteenlopende coderingswaarden en aandrijfcommando’s. Hiertoe moeten tevens servicegegevens worden toegevoegd, wat tot nu toe de efficiëntie aanzienlijk heeft gereduceerd, als gevolg van de transportprotocollen die voor het verzenden van meer dan 8 bytes vereist zijn. CAN FD nu biedt de mogelijkheid om tot 64 databytes te gebruiken. Zo kunnen grotere datablokken worden verzonden in een enkel bericht - vooral bij procesdata, kan nu complexere apparatuur volledig worden bestuurd met een enkel procesbericht. Voor servicedata worden transportprotocollen minder noodzakelijk, aangezien een CAN FD message vaak alleen voor configuratiedata en dergelijke vereist is.
Om onnodig verlengen van de besturingsdata te voorkomen, gebruikt CAN FD tevens maar 4 bits voor de datalengte code - de waarden 0 tot 8 zijn rechtstreeks overgenomen uit het klassieke CAN. De waarden die tot nu toe ongedefinieerd waren (9 tot 15, respectievelijk 1001 tot 1111) worden gebruikt voor de nieuwe, uitgebreide datalengte: behalve 0 tot 8 bytes, zijn nu ook 12, 16, 20, 24, 32, 48 en 64 bytes beschikbaar voor de user data. Datalengtes die hiervan verschillen zijn niet mogelijk, hetgeen betekent dat ongebruikte gebieden moeten worden opgevuld met ‘filler values’.
Behalve de snelle transmissie van het datagebied, kan de effectief bruikbare datasnelheid flink worden verhoogd door gebruik te maken van CAN FD, terwijl de cyclustijd aanzienlijk kan worden verkort. Op deze wijze kan een CAN FD netwerk met 500 kbit arbitrage, 4 Mbit datatransmissie en 64 databytes een effectieve datasnelheid van meer dan 5 Mbit/s bereiken.
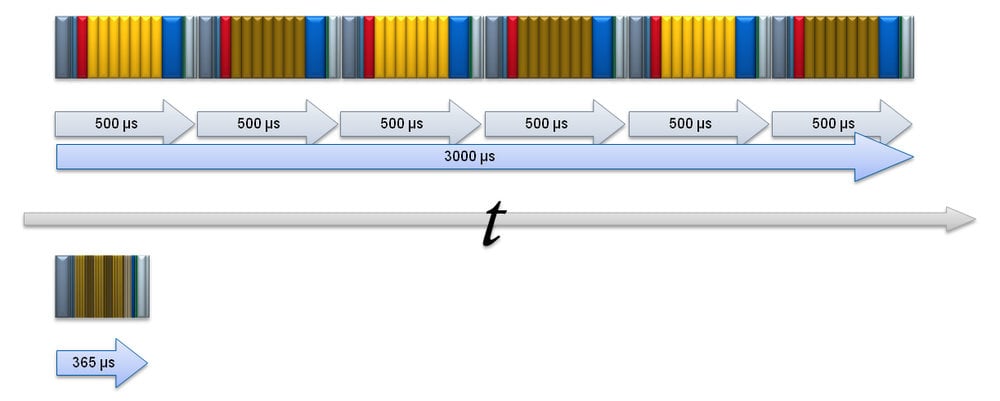
Afbeelding 2: Voordelen van CAN FD - 2
Deze figuur toont de CAN berichten, zoals weergegeven in figuur 1, in een enkele tijdlijn: voor het klassieke CAN wordt hier een datasnelheid van 250 kbit/s aangenomen. Voor berichten met 8 bytes van user data (in het voorbeeld 1 byte voor het transportprotocol en 7 bytes aan user data) en het maximaal mogelijke aantal stuff bits, heeft een klassiek CAN bericht ongeveer 500 microseconden bustijd nodig. Als het transmitter knooppunt in staat is om alle zes berichten achter elkaar zonder vertraging te versturen, zal de bus drie milliseconden lang volledig geblokkeerd zijn voor het versturen van de 42 bytes aan user data. Ter vergelijking, een CAN FD bericht met 48 bytes aan user data, 250 kbit/s arbitrage snelheid en 2 Mbit/s databit snelheid, bezet de bus voor slechts circa 365 microseconden - ook met het maximale aantal stuff bits. De aanzienlijk snellere gegevensoverdracht verbetert ook het real-time gedrag van CAN systemen door de aanzienlijk kortere responstijden, verhoogt tegelijkertijd de datasnelheid en vermindert de complexiteit van het databeheer!
Real-time functie
Het combineren van meerdere onafhankelijke datapakketten in een enkel bericht betekent dat de data administratie aanzienlijk eenvoudiger wordt, aangezien de aparte berichten niet langer tegen hoge kosten met elkaar hoeven te worden gesynchroniseerd. De snelle transmissie van grotere datapakketten in vergelijking met het klassieke CAN maakt verzending mogelijk van 8 keer het datavolume (64 bytes) in ongeveer dezelfde tijd die nodig zou zijn voor een klassiek 8-byte bericht. Hierdoor kunnen berichten met hoge prioriteit veel sneller worden verzonden en wordt de real-time capaciteit verbeterd.
Gegevensbeveiliging
Data security is een belangrijk onderwerp: ondanks de toegenomen pakketgrootte vergeleken met het klassieke CAN, voldoet CAN FD aan dezelfde eisen op het gebied van gegevensbeveiliging. Dit wordt bereikt door langere CRC controletoetsen te gebruiken, bijvoorbeeld met aangepaste algoritmes. Afhankelijk van het aantal verzonden databytes, wordt één van de drie verschillende CRC algoritmes gebruikt: de vorige CRC formule voor berichten met maximaal 8 databytes, alsmede twee verbeterde algoritmes met maximaal 16 databytes, of meer dan 16 databytes voor berichten. Het algoritme dat moet worden gebruikt voor de CAN besturing wordt bepaald door de datalengte code. Voor een nog betere beveiliging van gegevens, zijn extra aanbevelingen geïmplementeerd. Met als resultaat dat de CRC in CAN FD berichten altijd begint met een stuff bit; na 5 bits wordt een extra stuff bit opgenomen - in tegenstelling tot de CAN stuff bit regel, is deze onafhankelijk van de bitwaardes van de voorgaande bits. Elke stuff bit heeft de complementaire waarde van de vorige bit.
Achterwaartse compatibiliteit
Een nadeel van het overstappen van CAN naar snellere communicatiesystemen is de eis voor volledige conversie: alle CAN deelnemers moeten worden aangepast aan het nieuwe systeem, bijvoorbeeld EtherCAT. Als alternatief kan de machinebesturing worden uitgebreid voor het gebruik van meerdere heterogene netwerken. Beide procedures hebben voor- en nadelen. Met behulp van CAN FD is nu ook een extra ‘vriendelijkere’ optie beschikbaar: Aangezien CAN FD besturingen kunnen worden gebruikt als klassieke CAN knooppunten, kunnen alle netwerkknooppunten gefaseerd worden vervangen door voor CAN FD geschikte apparaten. Zodra het gehele netwerk voor CAN FD geschikt is, kunnen de voordelen van CAN FD in de ruimste zin worden benut. Dit is van bijzonder belang voor speciaalmachines, aangezien netwerkdeelnemers die niet kunnen worden vervangen door vrij beschikbare knooppunten vaak ook hier worden gebruikt – het gaat dan met name om klantspecifieke of intern ontwikkelde apparatuur.
Beschikbare tools voor CAN FD
Er is een aantal oplossingen beschikbaar voor de ontwikkeling van op CAN FD gebaseerde apparaten en netwerken – het gaat daarbij vooral om PC-CAN FD interfacekaarten voor een breed scala van pc interfaces, bijvoorbeeld de IXXAT CAN-IB 500/600 PCIe kaarten van HMS Networks. Deze CAN kaarten bevatten een uitgebreide reeks driver pakketten voor Windows, Linux en andere besturingssystemen, en maken eenvoudige aansluiting op bestaande systemen en snelle toevoeging van bestaande softwarepakketten aan CAN FD netwerken mogelijk, omdat ze CAN en CAN FD ondersteunen.
Naast de hardware-interfaces met de relevante driver software, zijn test- en analyse-tools nodig voor de effectieve uitvoering van CAN FD. In verband hiermee zal HMS op korte termijn en tegen een redelijke prijs een hoogwaardige totaaloplossing leveren in de vorm van een CAN FD compatibele versie van de bekende IXXAT canAnalyser.
Open onderwerpen voor CAN FD in de industriële sector
Behalve de hierboven genoemde tools, moet er rekening worden gehouden met andere belangrijke aspecten bij het gebruik van CAN FD in een productieomgeving. Het is raadzaam om in industriële toepassingen gestandaardiseerde hogere protocollen toe te passen: in CiA (CAN in Automation) wordt gewerkt aan het converteren van CANopen naar CAN FD - de CANopen V5 specificatie, die ook uitbreidingen bevat voor CAN FD, zal naar verwachting rond het midden van dit jaar beschikbaar zijn.
Een bijkomend, belangrijk aspect bij het gebruik van CAN FD betreft goedkope microcontrollers die in grote hoeveelheden beschikbaar zijn, inclusief geïntegreerde CAN/CAN FD controllers. Tot nu toe gebruiken de op de markt beschikbare apparaten vooral FPGA's met CAN FD IP kernen. Microcontrollers met geïntegreerde CAN FD logica zijn vaak geavanceerde componenten met meerdere CPU kernen voor complexe besturingen in voertuigen. Totdat eenvoudige, kosteneffectieve microcontrollers met geïntegreerde CAN FD ondersteuning beschikbaar komen, vormen op FPGA’s gebaseerde systemen de meest flexibele oplossing.
Vooruitzichten
CAN FD verbreedt het toepassingsgebied voor CAN-gebaseerde oplossingen door aanzienlijk verhoogde datasnelheden, een eenvoudige configuratie en het behoud van analysemogelijkheden, bekend van klassieke veldbussen. De verwachte beschikbaarheid van CANopen voor CAN FD betekent dat het nieuwe netwerksysteem ook in de industriële sector kan worden ingevoerd, en biedt een effectieve oplossing voor netwerken met een datasnelheid van 100 kbit/s tot 5 Mbit/s. Samen met de optie om de hogere datasnelheden of het uitgebreide dataframework afzonderlijk of in combinatie te gebruiken, maakt het flexibele ontwerp ervan CAN FD uiterst geschikt als een aanpasbaar veldbussysteem voor speciaalmachines.


Auteur: Thomas Waggershauser.
Sales Director bij IXXAT Automation GmbH, onderdeel van de HMS Group
Sales Director bij IXXAT Automation GmbH, onderdeel van de HMS Group
