
www.technologieenindustrie.com
04
'11
Written on Modified on
Hogesnelheid robot, DeltaBot, ontworpen met behulp van Maplesoft technologie
Na de voltooiing van de DeltaBot, een robot gebaseerd op een innovatief via kabels aangedreven delta-type ontwerp, kreeg dr. Khajepour vanuit de industrie een verrassend groot aantal verzoeken om de robot toe te passen. Op basis van deze commerciële vraag richtte dr. Khajepour AEMK Systems (www.AEMKSystems.com) op, een bedrijf dat is gespecialiseerd in het ontwerpen en leveren van hogesnelheid, op kabels en vision gebaseerde robotsystemen voor gebruik in een verscheidenheid aan industriële toepassingen. De DeltaBot is in staat om meer dan 120 pick-and-place cycli per minuut uit te voeren en om meer dan 20 kg te handlen.
De AEMK DeltaBot robots maken gebruik van kabels in plaats van stijve armen teneinde bewegingstraagheid en kosten van mechanische uitrusting te verminderen. Het eenvoudige ontwerp en de schaalbaarheid van de DeltaBot zorgen voor makkelijke integratie in bestaande automatiseringsomgevingen. De DeltaBot kan meer dan 120 pick-and-place cycli per minuut uitvoeren. Een van de onderscheidende kenmerken van de DeltaBot ten opzichte van andere deltarobots is het hoge laadvermogen. Terwijl andere deltarobots niet meer dan 3 kg kunnen handlen, kan de DeltaBot lasten tot 20 kg verwerken. De hoge snelheid, lage onderhoudskosten en het hoge laadvermogen maken het voor de industrie tot een zeer aantrekkelijk alternatief in vele automatiseringstoepassingen.
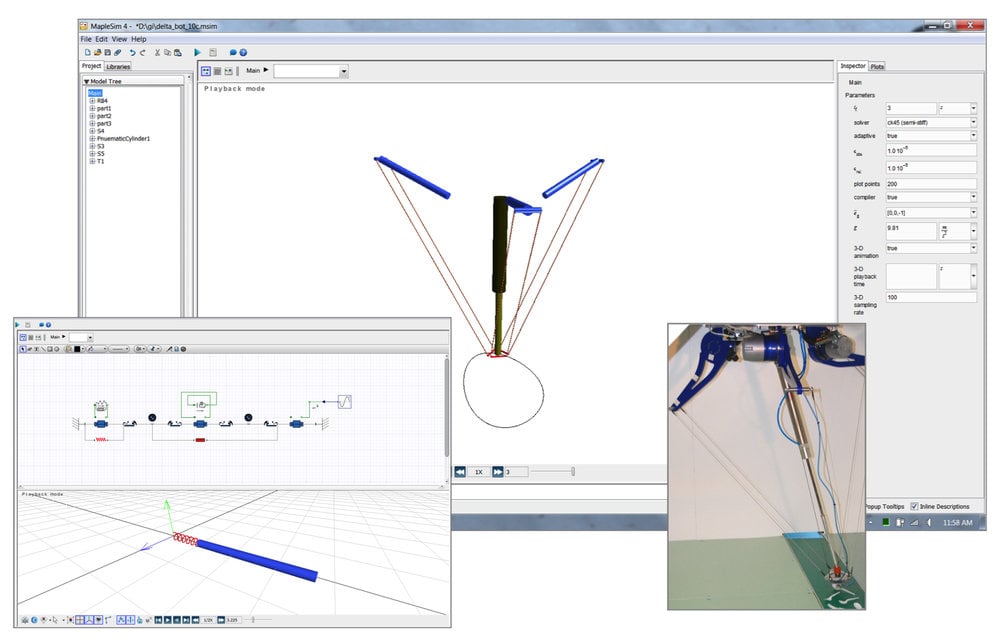
Al in de eerste fase van het onderzoek koos dr. Khajepour voor Maple, de geavanceerde technische software van Maplesoft™, als belangrijkste tool in het robotonderzoeksproject. Alle daarop volgende verbeteringen in het ontwerp en aan het Deltabot systeem, werden gerealiseerd met behulp van Maple en MapleSim, de high-performance fysische modellering- en simulatieoplossing van Maplesoft. Maple en MapleSim zijn gebouwd op een fundament van geavanceerde symbolische computertechnologie, die gebruikers in staat stelt zeer nauwkeurige resultaten te verzamelen over het systeemgedrag.
“De Maplesoft technologie vormt een integraal onderdeel van het ontwerpproces van het DeltaBot systeem en is nu een integraal deel van de verdere ontwikkeling van de robot,” zegt dr. Khajepour, directeur en oprichter van AEMK Systems en hoogleraar Werktuigbouw aan de Universiteit van Waterloo (Canada). “Door het gebruik van de Maplesoft technologie is de initiële ontwikkelingstijd van de robot aanzienlijk verminderd en blijven we profiteren van kortere ontwikkelingscycli terwijl we onze producten verder verbeteren.”
AEMK Systems past MapleSim momenteel toe voor het modelleren en simuleren van het DeltaBot systeem voor gebruik in real-time hardware-in-the-loop (HIL) tests, als onderdeel van het lopende onderzoeks- en ontwikkelingsprogramma. Bij het converteren van de beknopte modelvergelijkingen naar real-time broncode, gebruiken de code-generation tools in MapleSim extra optimalisatiestappen, hetgeen zorgt voor een verdere verhoging van de simulatiesnelheid, waardoor de resultaten kunnen worden toegepast in real-time systemen. "Door gebruik te maken van MapleSim en Maple kunnen we verbeteringen aan het ontwerp van de DeltaBot veel sneller doorvoeren en testen dan met andere ontwerptools,” aldus dr. Khajepour. "Deze producten maken het voor ons mogelijk om zeer snel in te spelen op de behoeften van onze klanten en op de veranderende eisen van industrie.”
Al in de eerste fase van het onderzoek koos dr. Khajepour voor Maple, de geavanceerde technische software van Maplesoft™, als belangrijkste tool in het robotonderzoeksproject. Alle daarop volgende verbeteringen in het ontwerp en aan het Deltabot systeem, werden gerealiseerd met behulp van Maple en MapleSim, de high-performance fysische modellering- en simulatieoplossing van Maplesoft. Maple en MapleSim zijn gebouwd op een fundament van geavanceerde symbolische computertechnologie, die gebruikers in staat stelt zeer nauwkeurige resultaten te verzamelen over het systeemgedrag.
“De Maplesoft technologie vormt een integraal onderdeel van het ontwerpproces van het DeltaBot systeem en is nu een integraal deel van de verdere ontwikkeling van de robot,” zegt dr. Khajepour, directeur en oprichter van AEMK Systems en hoogleraar Werktuigbouw aan de Universiteit van Waterloo (Canada). “Door het gebruik van de Maplesoft technologie is de initiële ontwikkelingstijd van de robot aanzienlijk verminderd en blijven we profiteren van kortere ontwikkelingscycli terwijl we onze producten verder verbeteren.”
AEMK Systems past MapleSim momenteel toe voor het modelleren en simuleren van het DeltaBot systeem voor gebruik in real-time hardware-in-the-loop (HIL) tests, als onderdeel van het lopende onderzoeks- en ontwikkelingsprogramma. Bij het converteren van de beknopte modelvergelijkingen naar real-time broncode, gebruiken de code-generation tools in MapleSim extra optimalisatiestappen, hetgeen zorgt voor een verdere verhoging van de simulatiesnelheid, waardoor de resultaten kunnen worden toegepast in real-time systemen. "Door gebruik te maken van MapleSim en Maple kunnen we verbeteringen aan het ontwerp van de DeltaBot veel sneller doorvoeren en testen dan met andere ontwerptools,” aldus dr. Khajepour. "Deze producten maken het voor ons mogelijk om zeer snel in te spelen op de behoeften van onze klanten en op de veranderende eisen van industrie.”
www.maplesoft.com
