
Autonomous driving: Where are we at?
Autonomous driving is considered a key innovation in road transportation in years to come. It sits at the forefront of vehicle technology and presents an opportunity for brand differentiation in a packed automotive market. Demand for autonomous driving is also trickling down the supply chain for systems and components that allow cars to drive and brake without human interaction. By K.A. Gerardino.
Image courtesy of Ecotron
As automakers, suppliers, and mobility providers calculate strategies for near and long-term positioning, factors such as technology maturity, regulation, consumer adoption, and liability loom and continue to impact development and deployment.
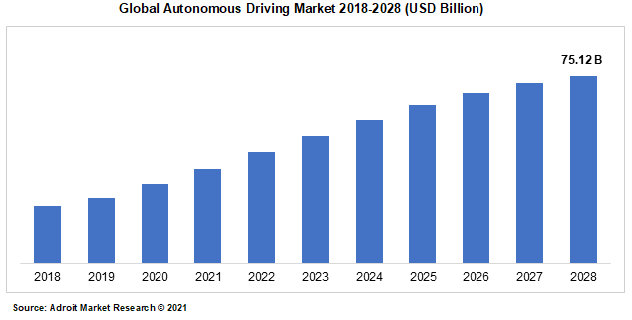
Adroit Market Research predicts the global autonomous driving market will secure a projected revenue hike of up to US$75.12 billion by 2028, progressing at a steady CAGR of around 33% over the forecast period. The market research firm sees the accelerated growth attributed to the large-scale modernization of the automotiveindustry, forsaking the conventional technologies and product strategies focusing on the
development of state-of-the-art vehicles.
One of the big promises of autonomous driving is to make driving safer than it is today. The assumption is that replacing the human driver with automation systems would eliminate the weakest part of the chain that is the source of nearly 90% of all accidents. Autonomous driving may also lead to less congestion on the roads because cars could communicate with one another and change routes based on traffic, accidents or construction.
SKEPTICISM TOWARD AUTONOMOUS DRIVING
A few years ago, the topic of autonomous driving has been met with intense debates between the apparent enthusiasm shown by technology companies and incumbent automakers versus the widespread consumer skepticism of the benefits of self-driving technology over human drivers. This evident swinging of perspectives has led industry stakeholders to be calculative on their push towards vehicle automation, setting forth more achievable and realistic goals on the autonomous technology roadmap.
Nevertheless, public views quickly changed when Tesla introduced its Enhanced Autopilot with mind-blowing features like traffic-aware cruise control, autosteer on divided highways, along with semi-autonomous navigation on certain roads. Aside from Tesla, other automakers such as Cadillac has its self-driving feature known as Cadillac Super Cruise. This feature allows your vehicle to maintain its speed, keep a proper distance from other vehicles on the road, and keep an eye on its lane of travel.
AUTONOMOUS DRIVING LEVELS
At the moment, fully autonomous vehicles don’t exist, and though some automakers and technology companies are getting closer to coming out with fully autonomous vehicles, they're still years away.
Before merging onto roadways, self-driving cars will first have to progress through 6 levels of driver assistance technology advancements. But what exactly are these levels, and where are we now?
According to the Society of Automotive Engineers (SAE), full autonomy is reached at SAE Level 5, in which a vehicle’s autonomous-driving system has complete control of all driving functions in all conditions, and manual intervention by the driver is not required in any case (bad weather, obstacles, etc.)
SAE utilizes a scale that defines six levels of vehicle autonomy, ranging from Level 0 (fully manual) to Level 5 (fully automated). This scale has been officially adopted by the US Department of Transportation, and is currently used universally by regulators and manufacturers worldwide as the de facto standard for autonomous vehicle grading. Here are the six levels of autonomous driving and where we are at currently.
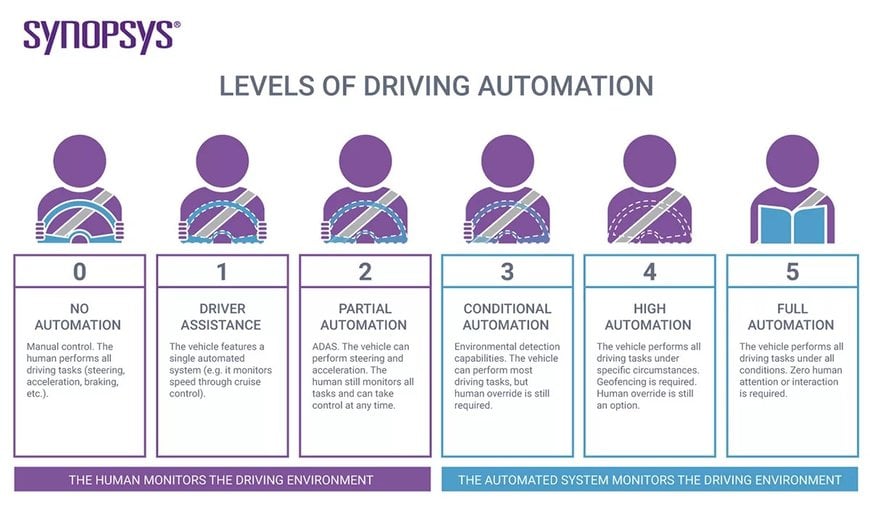
Image courtesy of Synopsys
- Level 0 (No Driving Automation): Most vehicles on the road today are Level 0: manually controlled. The human provides the dynamic driving task although there may be systems in place to help the driver. An example would be the emergency braking system―since it technically doesn’t drive the vehicle, it does not qualify as automation.
- Level 1 (Driver Assistance): This is the lowest level of automation. The vehicle features a single automated system for driver assistance, such as steering or accelerating (cruise control). Adaptive cruise control, where the vehicle can be kept at a safe distance behind the next car, qualifies as Level 1 because the human driver monitors the other aspects of driving such as steering and braking.
- Level 2 (Partial Driving Automation): This means advanced driver assistance systems or ADAS. The vehicle can control both steering and accelerating/decelerating. Here the automation falls short of self-driving because a human sits in the driver’s seat and can take control of the car at any time. Tesla Autopilot and Cadillac (General Motors) Super Cruise systems both qualify as Level 2.
- Level 3 (Conditional Driving Automation): The jump from Level 2 to Level 3 is substantial from a technological perspective, but subtle if not negligible from a human perspective. Level 3 vehicles have “environmental detection” capabilities and can make informed decisions for themselves, such as accelerating past a slow-moving vehicle. But they still require human override. The driver must remain alert and ready to take control if the system is unable to execute the task.
- Level 4 (High Driving Automation): The key difference between Level 3 and Level 4 automation is that Level 4 vehicles can intervene if things go wrong or there is a system failure. In this sense, these cars do not require human interaction in most circumstances. However, a human still has the option to manually override. The Level 4 vehicles can operate in self-driving mode. But until legislation and infrastructure evolve, they can only do so within a limited area, usually an urban environment where top speeds reach an average of 30mph. This is known as geofencing. As such, most Level 4 vehicles in existence are geared toward ridesharing.
- Level 5 (Full Driving Automation): Level 5 vehicles do not require human attention―the dynamic driving task is eliminated. Level 5 cars won’t even have steering wheels or acceleration/braking pedals. They will be free from geofencing, able to go anywhere and do anything that an experienced human driver can do. Fully autonomous cars are undergoing testing in several pockets of the world, but none are yet available to the general public.
AUTONOMOUS VEHICLES
While the future of autonomous vehicles is promising and exciting, mainstream production is still a few years away from anything higher than Level 2. Not because of technological capability, but because of security or the lack thereof.
Earlier this year, the Ponemon Institute published a report (commissioned by Synopsys), titled “Securing the Connected Car: A Study of Automotive Industry Cybersecurity Practices.” The report found that “connected” vehicles (like autonomous cars) are rich in physical safety features—seatbelts, airbags, antilock brakes—but not so rich in digital security features. When it comes to what’s needed for safe operation in an online world, connected cars are not yet ready for prime time.
The report is based on a survey of 593 security practitioners, product development professionals, and engineers. More than two-thirds of the respondents acknowledged that the need for better cybersecurity is “urgent” for obvious reasons: 62% said they think a malicious or proof-of-concept attack against automotive software/components is very likely in the next 12 months.
It’s fair to say that consumers won’t accept autonomous cars unless they are confident that they will be at least as safe as they would be on a commercial jet, train, or bus. That day is coming. But the automotive industry must get over a few speedbumps first.
FUNDAMENTALS AND KEY TECHNOLOGIES
Autonomous driving control systems are usually divided into three main parts: environmental perception, decision planning and control part, according to Ecotron, a manufacturer of controllers for electric and autonomous vehicles.
Environmental perception
The company explained that environmental perception collects information around the car through a variety of sensors, including camera, active radar, millimeter-wave radar, integrated navigation, and so on. At present, there are two main technical approaches in the industry, one is the camera based multi-sensor fusion scheme represented by Tesla. The other is a technical scheme represented by Google and Baidu, which is dominated by lidar and assisted by other sensors. In both scenarios, an intelligent control algorithm is needed to calculate the commands and routes according to the driver’s intentions, speed, external environment, etc. Finally, the wire-controlled system executes the driving commands and controls the operation of the vehicle. The key technologies involved in autonomous driving include environment perception, sensor fusion, V2X network, high-definition mapping, decision planning and other key technologies.

V2X Technology (Vehicle to Everything). Source: Thales.
Autonomous driving sensor systems need to collect information about the car’s surroundings and make decisions (turn, lane change, acceleration, deceleration). Environmental perception includes vehicle status, roads, pedestrians, traffic signals, traffic signs, traffic conditions, surrounding vehicles, and so on.
The status detection of the vehicle itself includes vehicle speed, driving direction, driving status, vehicle location, etc. Road perception includes road type detection, road marker identification, road condition judgment, whether the vehicle is deviating from the planned route, etc. Pedestrian perception mainly determines whether there are pedestrians in front of the vehicle, including daytime pedestrian identification, night pedestrian identification, pedestrian identification of whom is behind obstacles, etc.
Traffic signal perception mainly consists of automatic recognition of traffic lights at intersections, how-to pass-through intersections efficiently, etc. Traffic sign perception mainly identifies various traffic signs on both sides of the road, such as speed limits, bends, etc., to promptly alert drivers to their attention. Traffic condition perception is mainly to detect road traffic congestion, whether traffic accidents occur, and so on. Such that vehicles can choose a smooth route to travel. Vehicle perception around the vehicle mainly detects the vehicle situation in front, back and side of the vehicle to avoid collisions, including vehicles covered by obstacles at intersections. In complex road traffic environments, a single sensor cannot complete all the environmental perceptions. It is necessary to integrate all kinds of sensors and use sensor fusion technology to provide more robust and reliable road environment information for autonomous driving.
Vehicle to Everything (V2X) is a new generation of information and communication technology that connects vehicles with everything. V represents vehicles and X represents any object that interacts with vehicles. Current X mainly contains vehicle, human, traffic roadside infrastructure and networks. The modes for V2X information interaction include Vehicle to Vehicle (V2V), Vehicle to Infrastructure(V2I), Vehicle to Pedestrian (V2P) and Vehicle to Network (V2N). V2V technology allows vehicles to prevent accidents by forwarding real-time information about themselves and road situations in front of them, thus reducing driving time and ultimately improving the traffic environment and easing traffic congestion.
V2I technology helps vehicles and road-side traffic facilities to exchange data wirelessly. The main applications include intersection safety management, vehicle speed control, electronic toll payment, transportation safety management, road construction warning. This technology will promote the intelligence of transportation facilities, including No Entry traffic lights, weather information systems, and so on, to be intelligent transportation facilities that can identify high-risk situations through a variety of algorithms and automatically take alerting actions.
At present, the V2X field is divided into two standard and industrial camps: DSRC and C-V2X. DSRC standard was the earlier one. There are commercial chip modules. Mainstream automobile enterprises have conducted multiple rounds of testing. C-V2X is catching up, and the industrial chain has been gradually built. Compared with DSRC, C-V2X has larger bandwidth, can better support short-distance transmission and long-distance transmission, and can provide Internet of vehicles services for users within and outside the network coverage at the same time. It also has excellent performance in collision related scenarios same as DSRC. With the advent of 5g network, the problem of long delays of C-V2X network has been solved, and c-v2x may have even better potentials.
High-definition map has accurate vehicle location information and rich road element data information, which can help cars predict complex road information, such as slope, curvature, heading, etc. Compared with traditional, it has higher real-time performance. Because the road conditions often change, such as road renovation, worn or repainted sign lines, traffic sign changes, etc. These changes should be reflected in the HD map in time. The HD map will put more emphasis on the three-dimensional model and accuracy of space, strengthen the accuracy from meter level to centimeter level, and must display every feature and condition on the road very accurately.
Decision planning
Decision making is the core technology of unmanned intelligence, which is equivalent to the brain of an autonomous driving car. By comprehensively analyzing the information provided by the environmental perception system and the results of routing from the HD map, it makes plans for the current vehicle, including speed planning, direction planning, acceleration planning, etc. It produces corresponding decisions (car following, lane changing, parking, etc.). The planning technology also needs to consider the mechanical characteristics, dynamic characteristics, and kinematic characteristics of the vehicle.
At present, the networks widely used in automobile include CAN, LIN and MOST bus, which are characterized by low transmission rate and narrow bandwidth. With more and more high-definition video applications entering cars, such as ADAS and 360-degree panoramic parking system, the transmission rate and bandwidth of the existing communication bus cannot meet the needs. Vehicle Ethernet conforms to the development trend of the future autonomous driving industry, that is, the principle of openness and compatibility. It is most likely to work in the intelligent networked vehicle environment. It adopts a star connection architecture. Each device or link can exclusively enjoy 100m bandwidth, and the transmission rate reaches 10 Gigabit. At present, some scenarios of vehicle Ethernet have started to be applied.
Information security and privacy protection technology
Autonomous driving vehicle also brings information security problems through the access of vehicle network. In application, every vehicle and its owner’s information will be transmitted to the network whenever and wherever possible. The information exposed in the network can easily be stolen, interfered, or even modified, which directly affects the safety of the intelligent network system. Therefore, in the intelligent networked vehicle, we must pay attention to the research of information security and privacy protection technology.
Although there are still lots of technology problems to be solved in autonomous driving field, the whole industry is still developing so rapidly. In the urban areas, autonomous driving has begun to be applied. Closed low-speed scenarios such as park sanitation, terminal distribution, plant logistics and airport logistics will be copied and put into application in batch in the next 2-3 years. Autonomous driving under public transport will become more and more common. In the future, autonomous driving will almost certainly become a common technology.
MAJOR PLAYERS
The global autonomous driving market players are firmly placed alongside the rapidly rising number of emerging players coming forth with disruptive technologies and highly novel product development strategies with a view of catalyzing the evolution of the self-driving vehicle industry. The high prevalence of threats proposed by young market players, along with the accelerated development of high-quality and top-class vehicle components are strengthening the overall market landscape in the global autonomous driving market.
The major players of the global autonomous driving market are Ford Motor Company, BMW, General Motors, Volkswagen Group, Daimler AG, Toyota Motor Corporation, Renault-Nissan-Mitsubishi alliance, Groupe SA, Tesla, Volvo-Autoliv-Ericsson-Zenuity alliance, Audi AG, Uber Technologies, Honda Motor and AB Volvo. The global autonomous driving market comprises of large-scale well established local market participants and the globally acknowledged players. In addition, the assessed market players are introducing a vast range of novel technologies and innovative product techniques with a view of staying competitive in the global market.
CARS WITH ADAS FEATURES IN 2022
As of 2020, around 50% of newly registered vehicles had these advanced driver assistance systems. Experts predict that this percentage will increase as relevant authorities set new rules for new cars. Car manufacturers are racing to produce cars with the best ADAS features. Therefore, several automakers have vehicles with advanced driver assistance systems in the current market. Here are popular cars with ADAS.
Tesla Model 3: This car features full-self driving capability and autopilot that depend on an onboard computer, 12 ultrasonic sensors, and eight external cameras. However, these features don’t make this car autonomous. Instead, it requires a fully attentive driver on the wheel to take control at any moment.
Mercedes-Benz S Class: This vehicle comes with innovative advanced driver assistance systems, including Active Distance Assist Distronic, Active Speed Limit Assist, Active Lane Change Assist, Active Brake Assist, Active Emergency Stop Assist, Active Parking Assist, Traffic Sign Assist, Blind Spot Assist, Remote Parking Assist, and Evasive Steering Assist.
BMW IX: BMW engineers the iX model to be an electric car. This vehicle features Level 2 semi-autonomous driving systems. These systems depend on five cameras, 12 ultrasonic sensors, and five radar sensors. It also has other features like Blind Spot Warning, Forward Collision Warning, Lane Guidance Assist, Lane Keeping Assist, Parking Assist, and Emergency Steer Assist.
Nissan Rogue: Currently, the Rogue is the best-selling vehicle from this automaker. Semi-autonomous ProPilot assist is the best self-driving feature of this car. This feature comes with a Navi-Link assisting with braking, acceleration, and steering. It also has standard safety 360 suite shields, including Rear Automatic Braking, Emergency Braking, Blind Spot Warning, Lane Departure Warning, High Beam Assists, and Rear Cross-Traffic Alert.
Volvo XC40 Recharge: This car comes with the essential building blocks for self-driving vehicles called the Ride Pilot. Its top features include Cyclist and Pedestrian Detection, Automated Emergency Braking, Adaptive Cruise Control, Lake-Keeping Assist, and Lane-Departure Warning.
Automakers are undoubtedly creating increasingly advanced driver assistance systems that include partial-automation features. As ADAS technologies improve, vehicle buyers, want to purchase cars that boost safety, convenience, and the overall driving experience.
CONCLUSION
There is no doubt that the emergence of autonomous driving has increased over the past few years. From “just possibility,” it has achieved the status of “certainty”. Although, the mass-adoption of autonomous vehicles in developed markets is still some time away, and predictions so far, it is still encouraging and optimistic. Moreover, in markets with less developed road transportation infrastructure, the timelines for mass-market adoption are much further away. The industry will need to gain real experience and incorporate learnings, before being driven in a self-driving passenger car.
